Available Now
Book a demo and get early access. Free trial!

Not every task in robotics is quick. Sometimes you need your robot to start moving toward a goal, but also check in along the way — think navigation, arm motion planning, or docking maneuvers. That’s where ROS 2 Actions shine.

An Action in ROS 2 is a communication interface used for long-running tasks that:
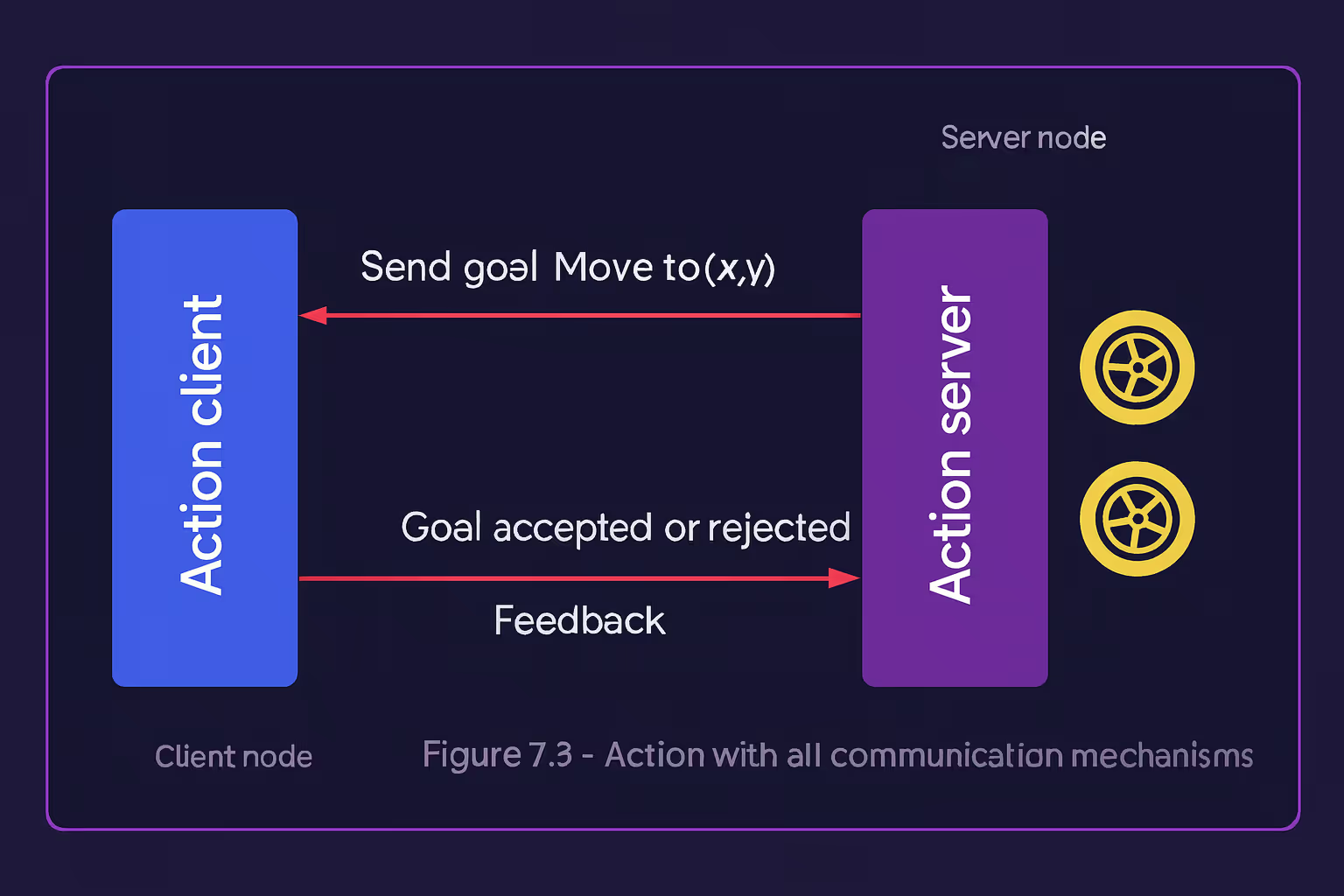
Actions are built on top of topics and services. They consist of:
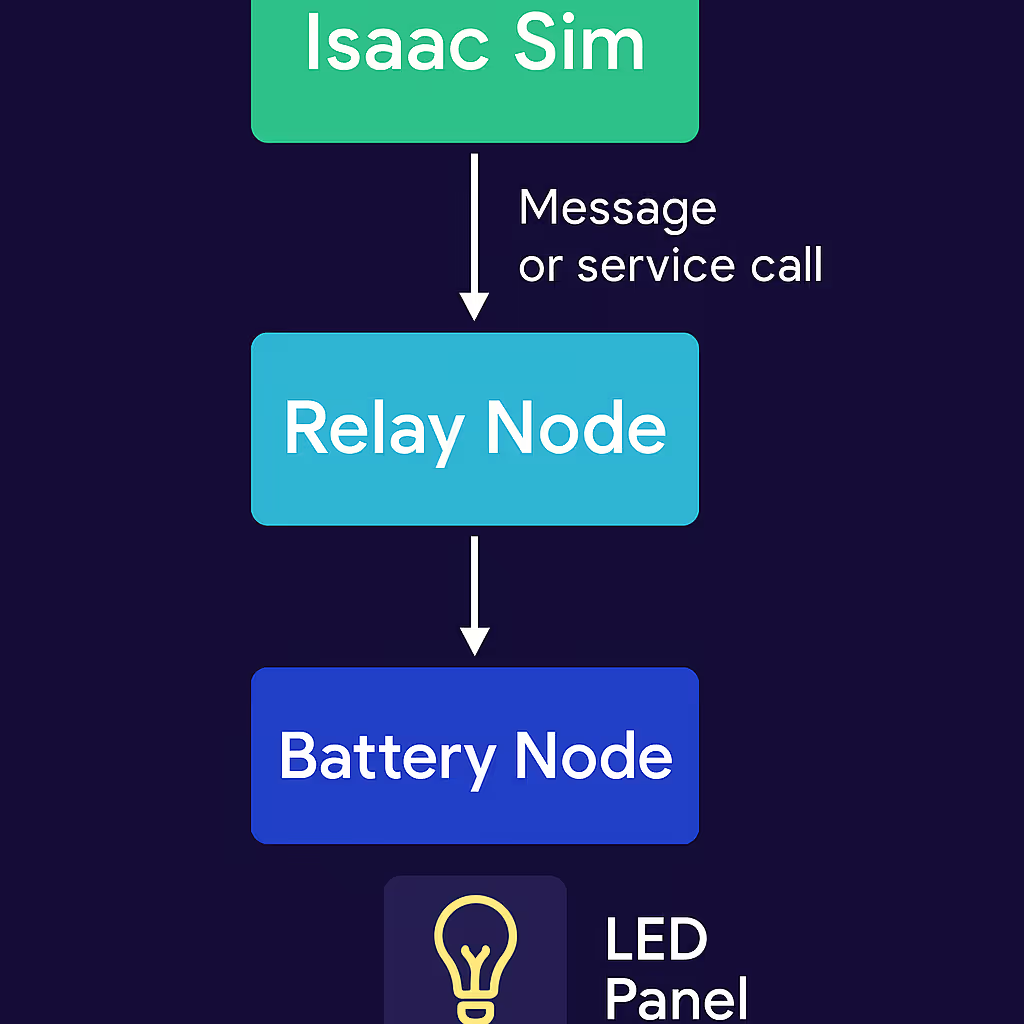
Isaac Sim often simulates complex robotic behaviors like:
In these cases, a service wouldn’t work — it’s blocking, meaning it halts execution until a result is returned, and it offers no insight into task progress. A topic is too open-ended — it streams data continuously but doesn’t define task boundaries or report when something is finished.
But an Action? Perfect. 🏁
It allows you to initiate a task, receive feedback while it's running, and handle results or cancellations with precision — exactly what’s needed when simulating time-sensitive or feedback-critical behaviors in Isaac Sim.
nav2's action interface to command a robot to drive across a scene, with Isaac visualizing the path and reporting travel progress.


Book a demo and get early access. Free trial!