Available Now
Book a demo and get early access. Free trial!

If you’ve ever set up a robot in both ROS and Isaac Sim, you’ve probably run into this invisible wall: everything looks right, but the robot doesn’t act right. Camera views don’t align, end-effectors miss their marks, and sensor data seems… off.
More often than not, the culprit is a mismatch in TFs — the transforms that define where things are in 3D space.
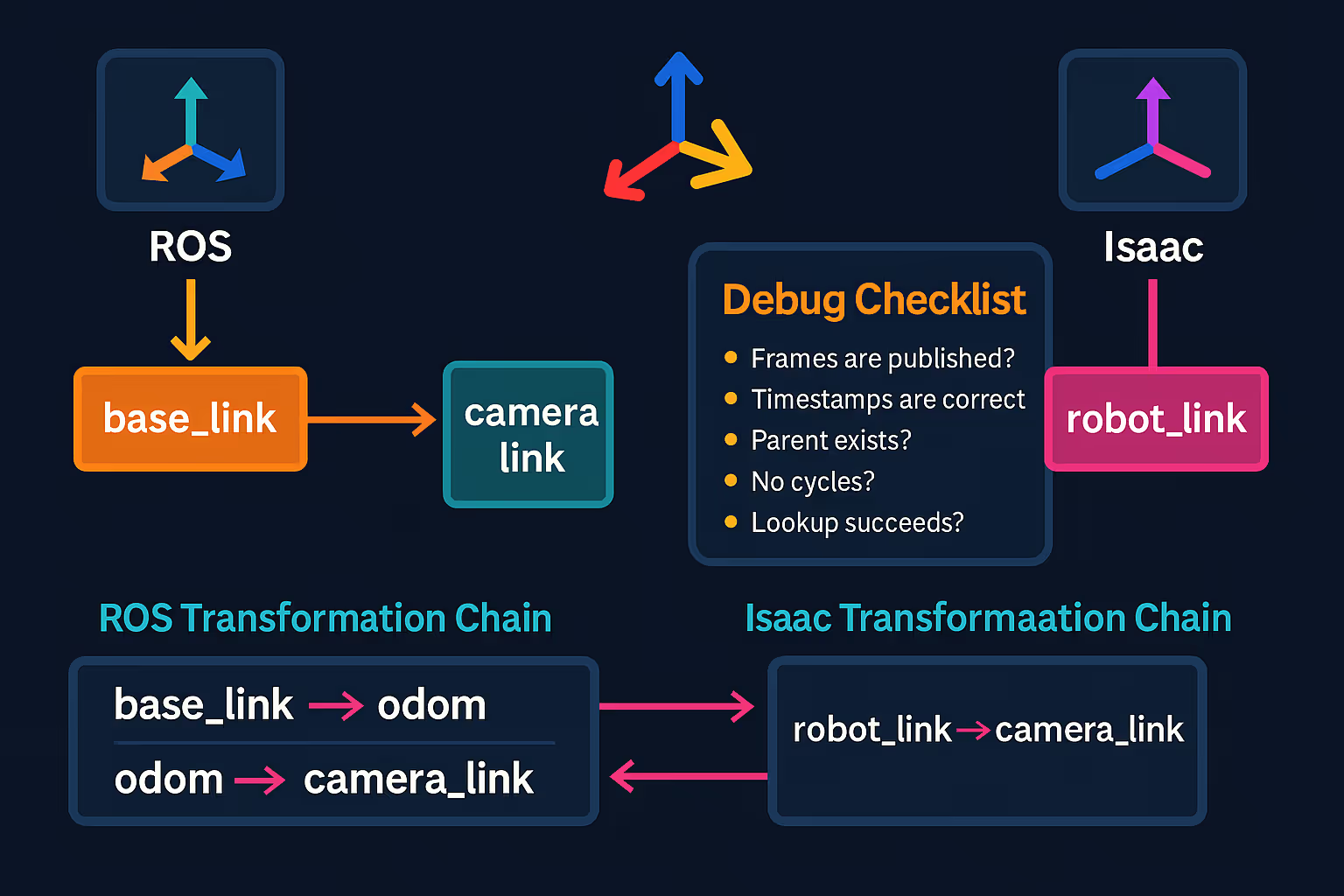
In ROS, TFs are broadcasted relationships between coordinate frames. They tell the system how each part of the robot is positioned and oriented in 3D space — and crucially, how these relationships change over time.
In Isaac Sim, similar relationships exist through USD’s xformOp:transform or URDF frame definitions — but they’re often static, defined once in the model.
The two systems need to be in sync, especially if you’re simulating in Isaac and controlling via ROS, or vice versa. This includes everything from your robot’s base link, to the camera mount, to the gripper tip.
Here’s the most common and costly mistake:
The TF tree in Isaac doesn’t match the TF tree in ROS.
Maybe:
base_link in ROS is off by 5 cm from the one in Isaac.This leads to silent failures:
Since both Isaac and ROS trust their own TF definitions, they won't warn you — but the robot's behavior will tell you something’s wrong… if you're lucky.
Here’s a quick sanity list when syncing Isaac Sim with ROS TFs:
✅ Compare your TF tree in ROS (ros2 run tf2_tools view_frames) with Isaac’s stage graph.
✅ Export USD files from URDF using Isaac’s converter — then verify transforms haven’t been collapsed or renamed.
✅ Add debug visualizers in RViz and Isaac to double-check alignment visually.
✅ Use /tf and /tf_static echoing in ROS to inspect real-time data. Is every frame there? Is it static or dynamic?
✅ Don’t hardcode transforms in code — keep them tied to TF where possible.
Whether you start from a URDF or a USD file, define your TFs once and make them consistent across both systems.
We recommend:
ros2_bridge or your own publisher to keep /tf up to date — don’t fake transforms with hardcoded data.Think of TFs as the ground truth API for your robot’s spatial awareness. Get it right, and everything else becomes easier — simulation, control, perception, deployment.


Book a demo and get early access. Free trial!