Available Now
Book a demo and get early access. Free trial!

Tired of opening a dozen terminals to start your simulation? That’s where launch files come in. In ROS 2, launch files are your automation toolkit — letting you spin up multiple nodes, set parameters, and configure environments all at once. No more remembering every command. No more typing them in order. Just click launch and go.

Launch files in ROS 2 are like orchestration scripts — they start nodes, apply parameters, and create repeatable system configurations. In Isaac, they become the glue between different agents, sensors, and logic.
A launch file is a script (usually written in Python) that tells ROS 2 how to start and configure multiple nodes together. Think of it like an orchestration plan — it launches nodes, sets their parameters, defines namespaces, remaps topics, and even sequences startup delays.
This is crucial when working with complex systems like Isaac Sim, where you might need:
All coordinated, in the right order.
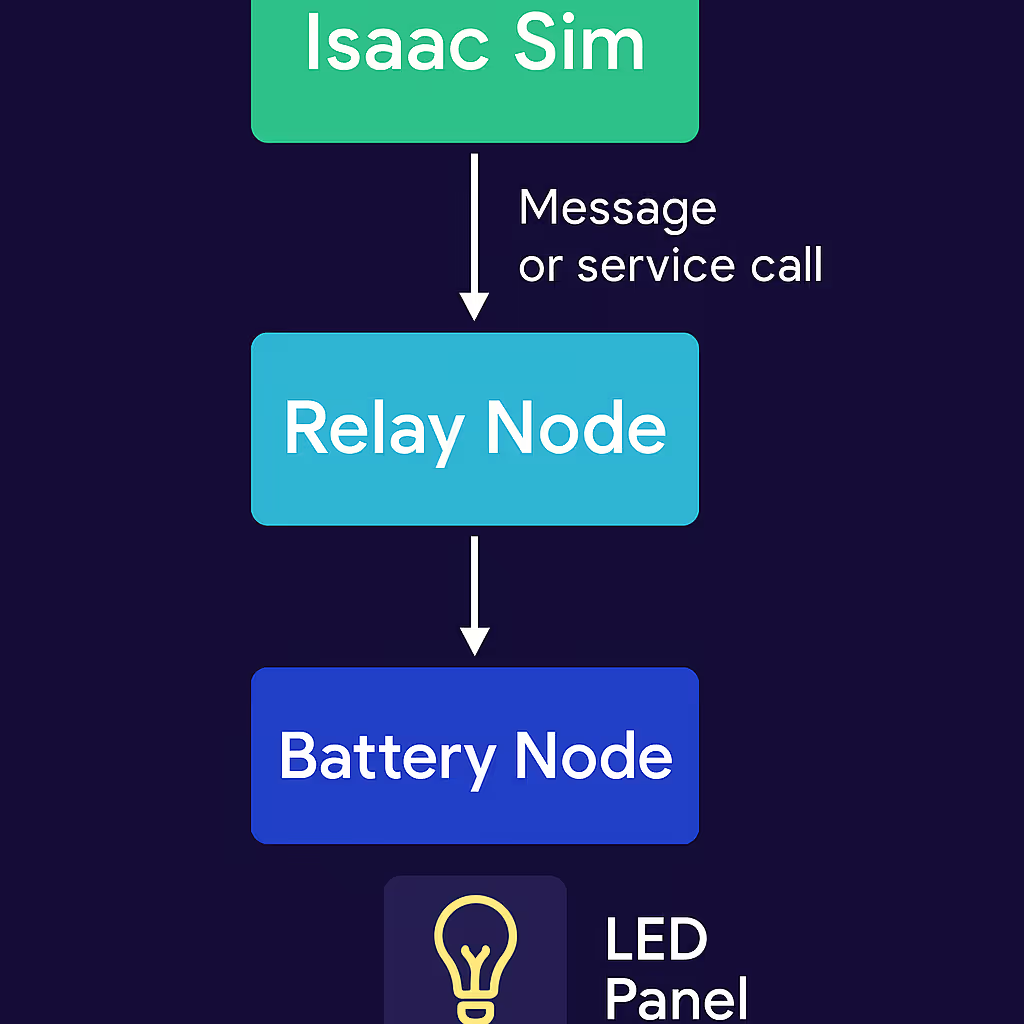
Use a launch file to spin up your ROS 2 bridge, robot control node, and camera subscriber in one step. This is critical for deploying multi-robot simulations or training environments with consistent setups.
In simulation workflows, consistency and reproducibility are everything. Launch files allow you to:
Pro Tip:
Use launch_ros.actions.Node to declare each node in Python-based launch files. Add conditionals or substitutions to make your scripts reusable across machines or projects.Launch files allow parameter substitution, meaning you can test different robot configs in parallel with ease.


Book a demo and get early access. Free trial!