Available Now
Book a demo and get early access. Free trial!

If you're just getting started with ROS 2 (Robot Operating System 2), you’ll quickly run into two core terms: packages and nodes. Think of a package 📦 as a folder that contains everything needed for a part of your robot’s software—scripts, config files, dependencies, and more. It’s like a self-contained toolbox. A node 🤖 is a single running program (a process) that performs one specific function—like controlling a motor, publishing camera data, or processing sensor input. In ROS 2, you’ll often have multiple nodes inside a single package, or distribute nodes across different packages depending on your application’s complexity.
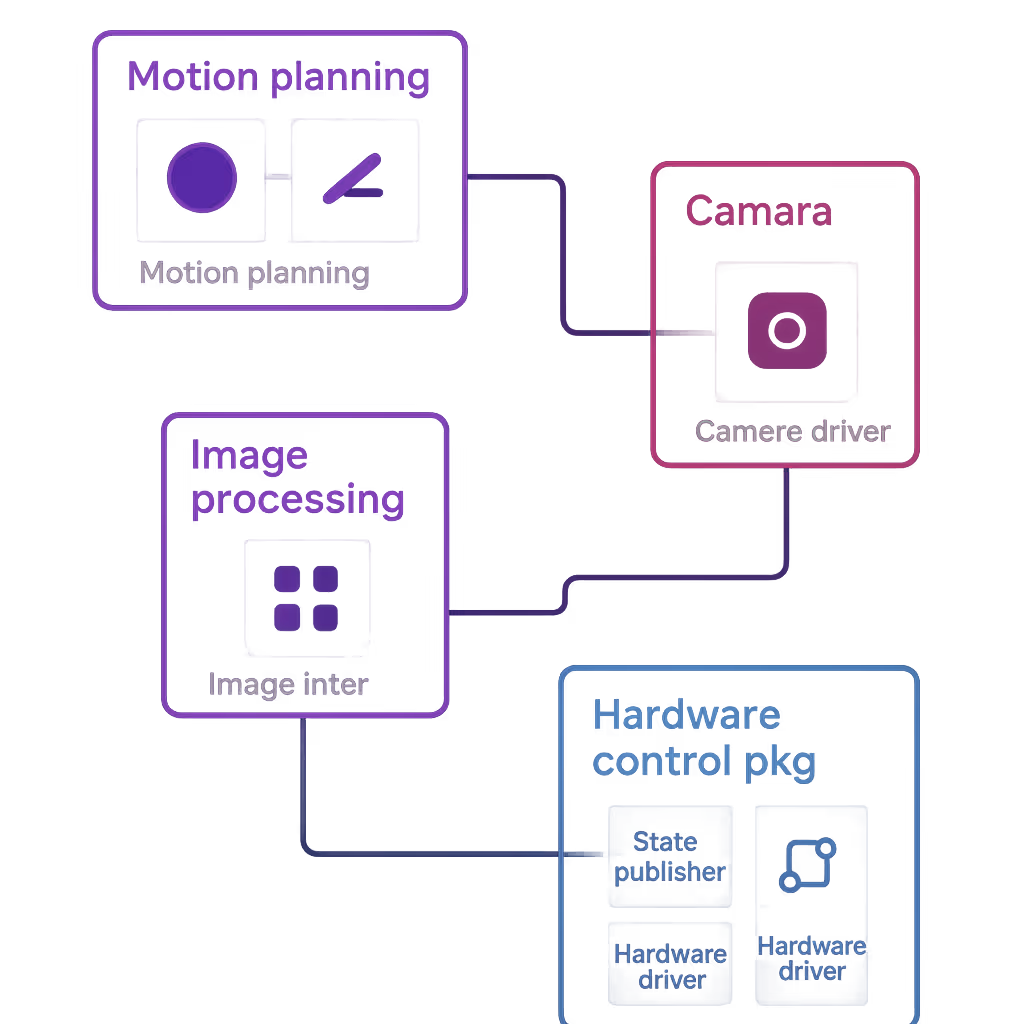
In a real-world robotics system, you wouldn’t cram everything into one massive script. Instead, you organize things like this:
camera_driver node that publishes image data.image_processing node that subscribes to camera data and applies filters or object detection.motion_planning and path_correction to compute trajectories and avoid obstacles.state_publisher and hardware_driver that interface with the physical robot.Each node uses ROS 2 communications—topics, services, and actions—to talk to each other.
By splitting logic into nodes and organizing them into packages, you:
✅ Make your code modular
✅ Enable team collaboration
✅ Simplify debugging and reuse
✅ Support scalable systems with many components


Book a demo and get early access. Free trial!