Available Now
Book a demo and get early access. Free trial!

In robotics and autonomy, repeatability is everything. You need to:
To do that, you need a way to freeze your entire simulation state. That’s where the combination of ROS 2 bag files and USD scenes becomes so powerful.
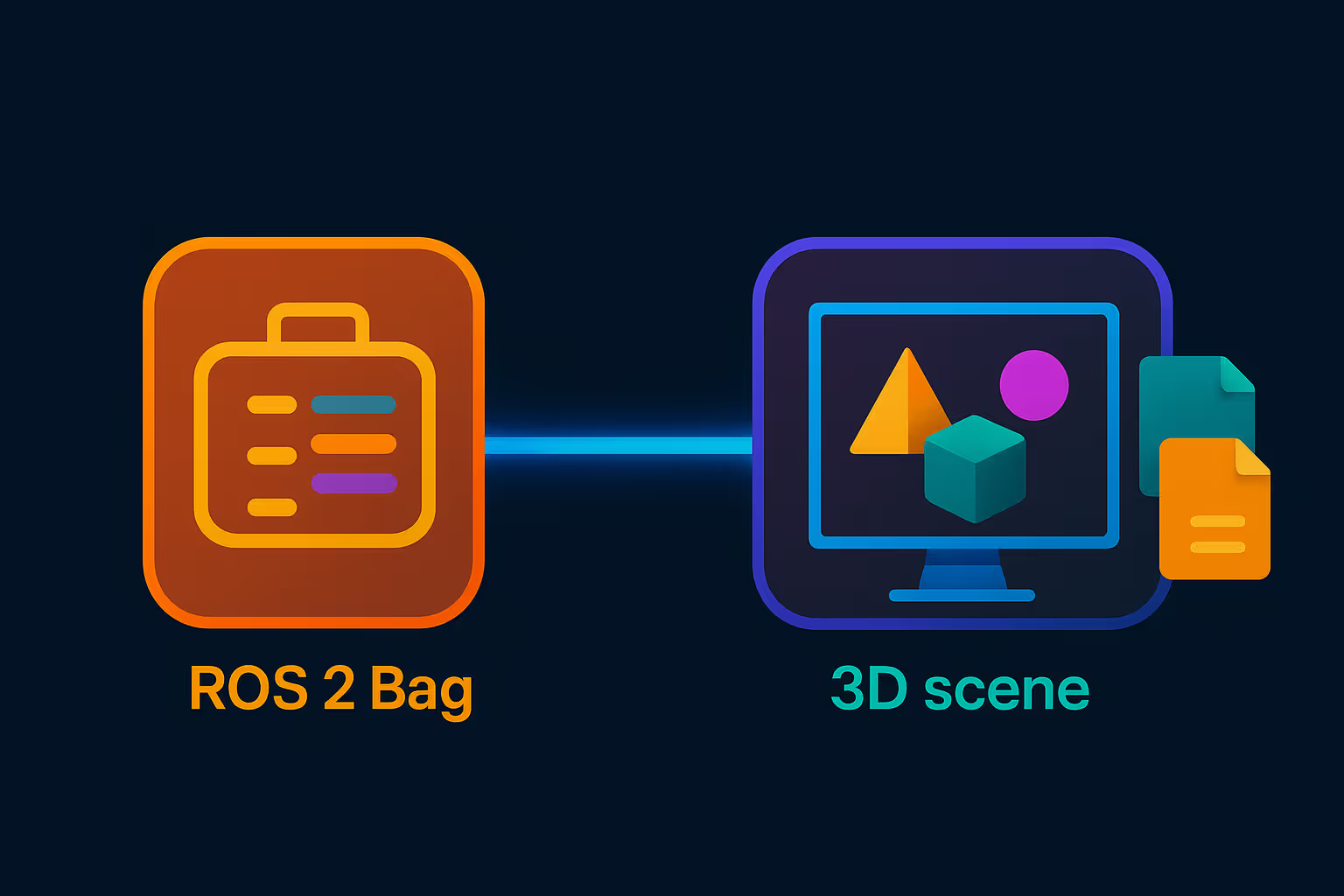
| Asset Type | What It Captures | Format |
| ------------- | -------------------------------------------------------- | ------------------------ |
| **ROS 2 Bag** | Sensor data, control commands, robot state, topic timing | `.db3`, `.yaml` |
| **USD Scene** | 3D world layout, physics, lighting, sensor configuration | `.usd`, `.usda`, `.usdc` |
Together, they let you replay exactly what the robot did, saw, and felt, in exactly the world it happened in.
While running a robot in Isaac Sim:
ros2 bag record -a
This captures all topics: LiDAR, camera, IMU, /cmd_vel, /joint_states, etc.
In Omniverse Isaac Sim:
File > Save As.usd file representing the full environment and robot pose at the moment of recording.You now have a static snapshot of the physical world.
Reload the saved .usd stage and replay the bag:
ros2 bag play <bag_name>
This re-publishes the same sensor/control data while the robot lives in the same virtual world geometry. Isaac Sim receives these messages as if the robot is acting live.
| Use Case | Benefit |
| ----------------------------- | --------------------------------------------------------------------------------- |
| **AI Regression Testing** | Re-test the same scenario across model versions |
| **Simulation Debugging** | Reproduce bugs with full visual + sensor context |
| **Synthetic Data Generation** | Generate new camera images or point clouds from different lighting or camera rigs |
| **Sim-to-Real Transfer** | Validate that real-world runs can be simulated and matched in Isaac |
| **Scenario Variation** | Change the USD (e.g., object pose) but replay same bag for robustness testing |


Book a demo and get early access. Free trial!