Available Now
Book a demo and get early access. Free trial!

If you're new to robotics or simulation, you might be wondering: “I just wrote some Python code that publishes numbers to a ROS 2 topic…
How does that actually move a robot inside NVIDIA Isaac Sim?” Great question. Let’s break it down, step by step — no assumptions, no jargon.
When you write a ROS 2 node like this:
msg.data = [0.0, 0.5, -0.5, 1.0, 0.0, 0.3]
You're sending a message — specifically, a list of six numbers that represent joint angles for a robotic arm. Think of it like saying:
“Hey robot, move each of your six joints to this position.”
But your Python script isn’t connected directly to a physical or virtual robot.
So how does the message get there?
Isaac Sim is a powerful simulator built by NVIDIA. It can simulate real-world physics, sensors, and robot hardware.
But to understand ROS messages (like the one you just sent), Isaac Sim uses something called the ROS 2 Bridge.
Here’s what the bridge does:
🛠️ It listens for messages from your ROS 2 node — like those joint commands.
🔁 Then it converts them into simulation commands that Isaac understands.
You don’t have to write this logic yourself — Isaac Sim comes with it built-in.
Let’s say your robot is loaded into Isaac Sim (like a KUKA or UR10 arm), and it’s configured with an Articulation Controller. That controller acts like the robot's muscles — it knows how to move joints when it receives input.
Now, inside Isaac Sim, you configure a mapping that tells the ROS 2 Bridge:
{
"topic": "/robot_arm/joint_positions",
"type": "std_msgs/msg/Float64MultiArray",
"targetPrim": "/World/MyRobot",
"command": "SetJointPositions"
}
This mapping says:
“Take joint angles from the/robot_arm/joint_positionstopic and use them to move the robot at/World/MyRobot.”
That’s it. Once this is set up, your code and Isaac Sim are talking.
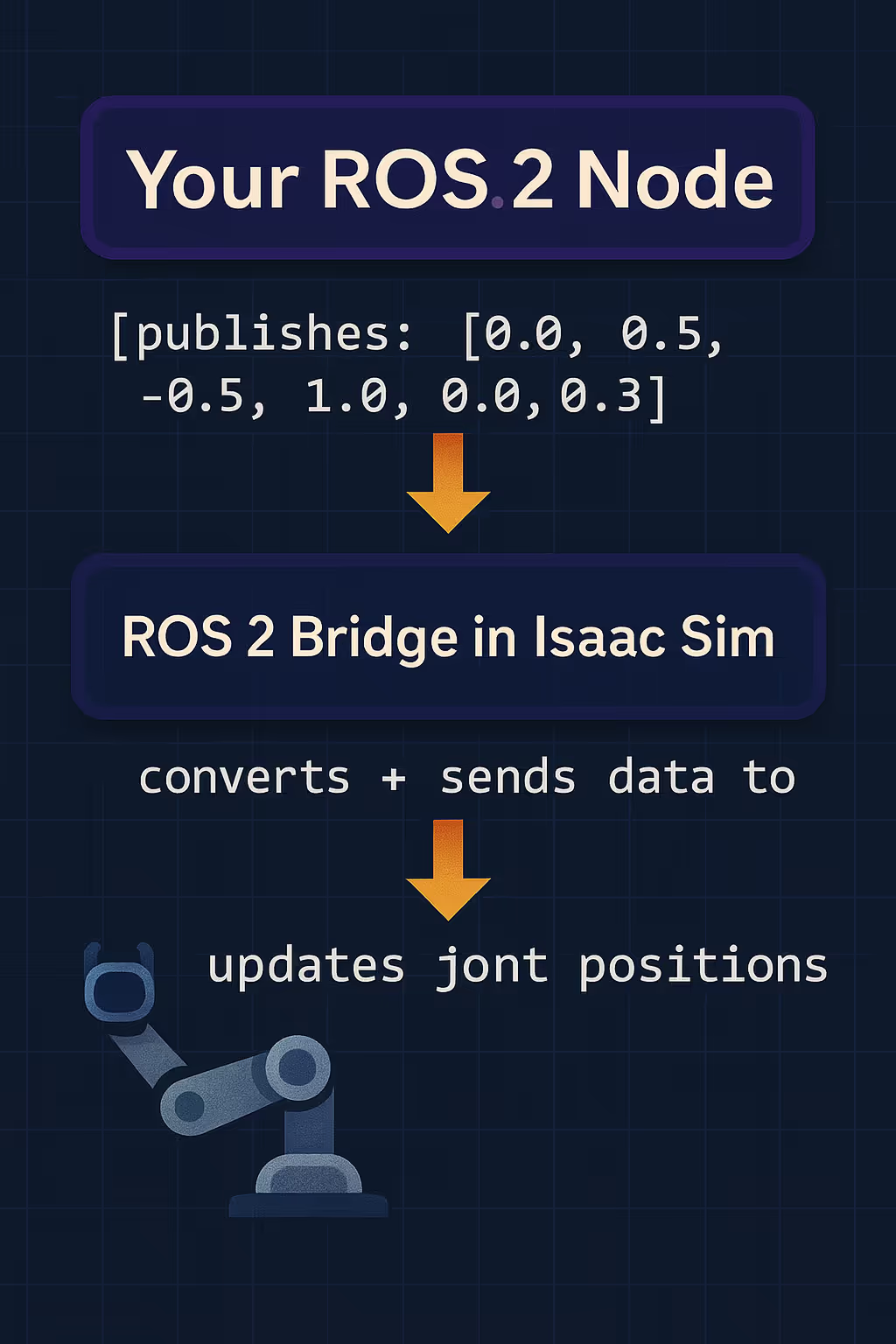
Here’s how the entire process flows:
[Your ROS 2 Node]
|
| publishes: [0.0, 0.5, -0.5, 1.0, 0.0, 0.3]
↓
[ROS 2 Bridge in Isaac Sim]
|
| converts + sends data to
↓
[Articulation Controller on Robot in Simulation]
|
| updates joint positions
↓
🤖 Robot Arm Moves in Real Time
So that small script you wrote? It’s now controlling a virtual robot arm inside a high-fidelity physics simulator.


Book a demo and get early access. Free trial!