Available Now
Book a demo and get early access. Free trial!

As robotics systems become more complex, teams need to bridge the gap between prototyping and real-world testing. ROS 2 and NVIDIA Isaac Sim offer powerful solutions—one for building real-time control logic, and the other for physically realistic simulation. But until now, syncing the two often required brittle integrations or extensive custom coding.Champion bridges this gap.

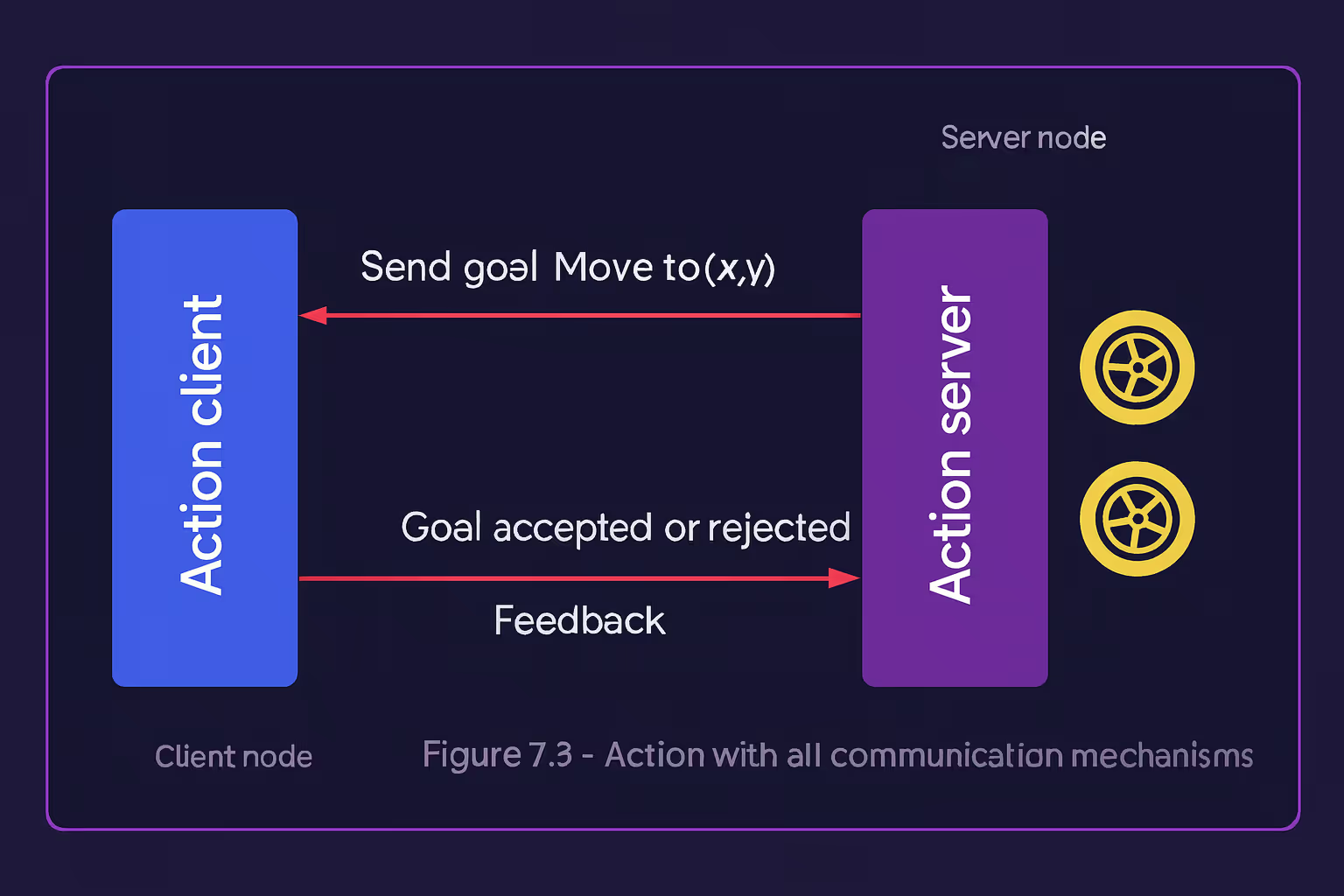
ROS 2 is the standard for robotic software architecture. It’s modular, scalable, and designed for real-time performance—making it perfect for:
Isaac Sim is NVIDIA’s high-fidelity robotics simulator built on the Omniverse platform. When integrated with ROS 2, it becomes a powerful environment for testing real-time robot control in simulated worlds.
Using ROS 2 inside Isaac Sim, you can:
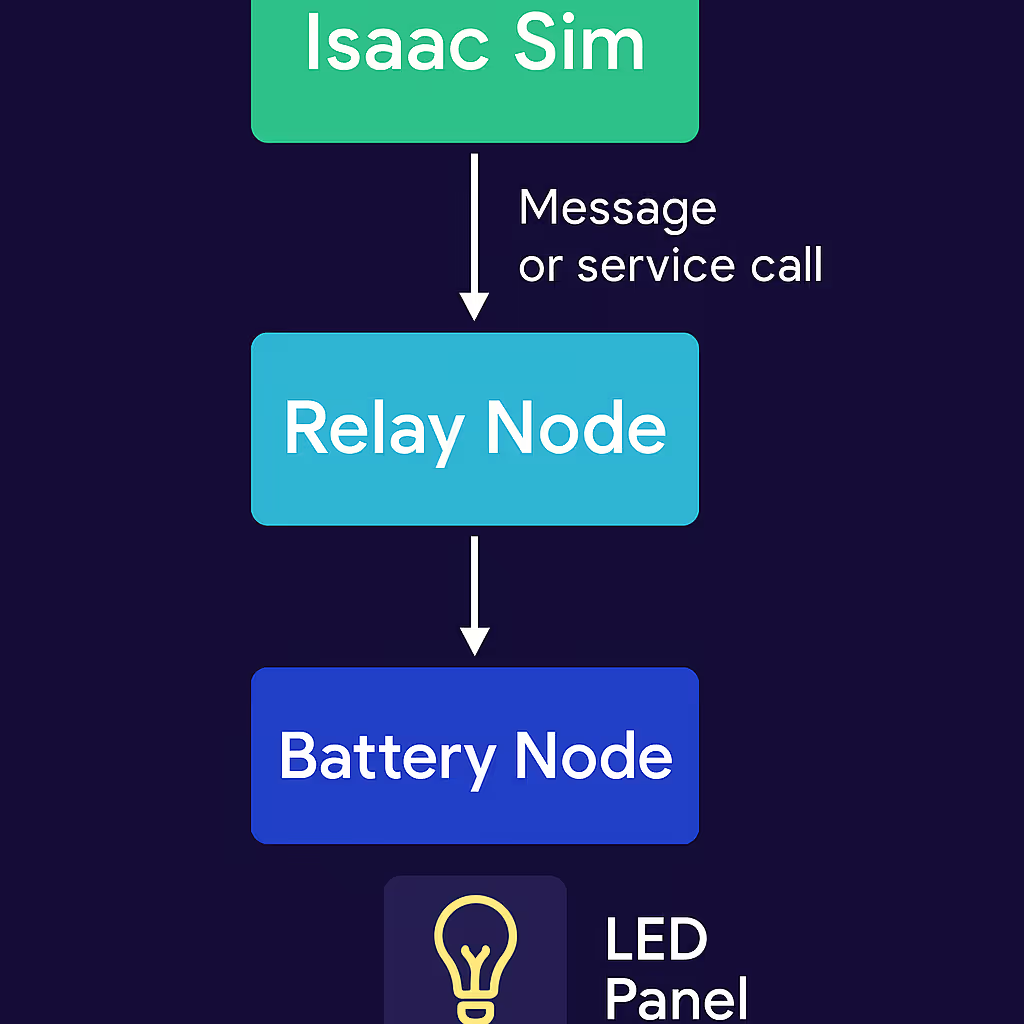
This lets engineers write once in ROS 2 and validate across both virtual and physical robots—using Champion to manage assets, automate scene setup, and record outcomes.
Champion is the missing layer between CAD → ROS 2 → Isaac Sim.
We automate the pipeline so you can:
Champion makes it possible to go from design → code → test in hours instead of weeks.
Whether you’re:
Champion unifies your stack.


Book a demo and get early access. Free trial!