Available Now
Book a demo and get early access. Free trial!

ROS 2 is a modular robot framework where everything starts with a node — but that’s just the beginning. To build anything meaningful, you’ll also need to master topics, services, actions, parameters, and launch files. This guide walks you through each of these in a hands-on, progressive flow.

ROS 2 is a flexible framework for building robot software. Its power lies in how it breaks a system into small, reusable components that communicate cleanly. These components — called nodes — talk to each other using well-defined mechanisms: topics, services, and actions. Developers can configure behavior at runtime using parameters, and orchestrate entire systems with launch files.
A node is a single unit of work in ROS 2—like a sensor driver, motion planner, or controller. Each node runs independently but can communicate with others.
Topics are used for one-way, streaming communication. A node publishes messages on a topic (e.g., camera frames), and other nodes subscribe to receive that data.
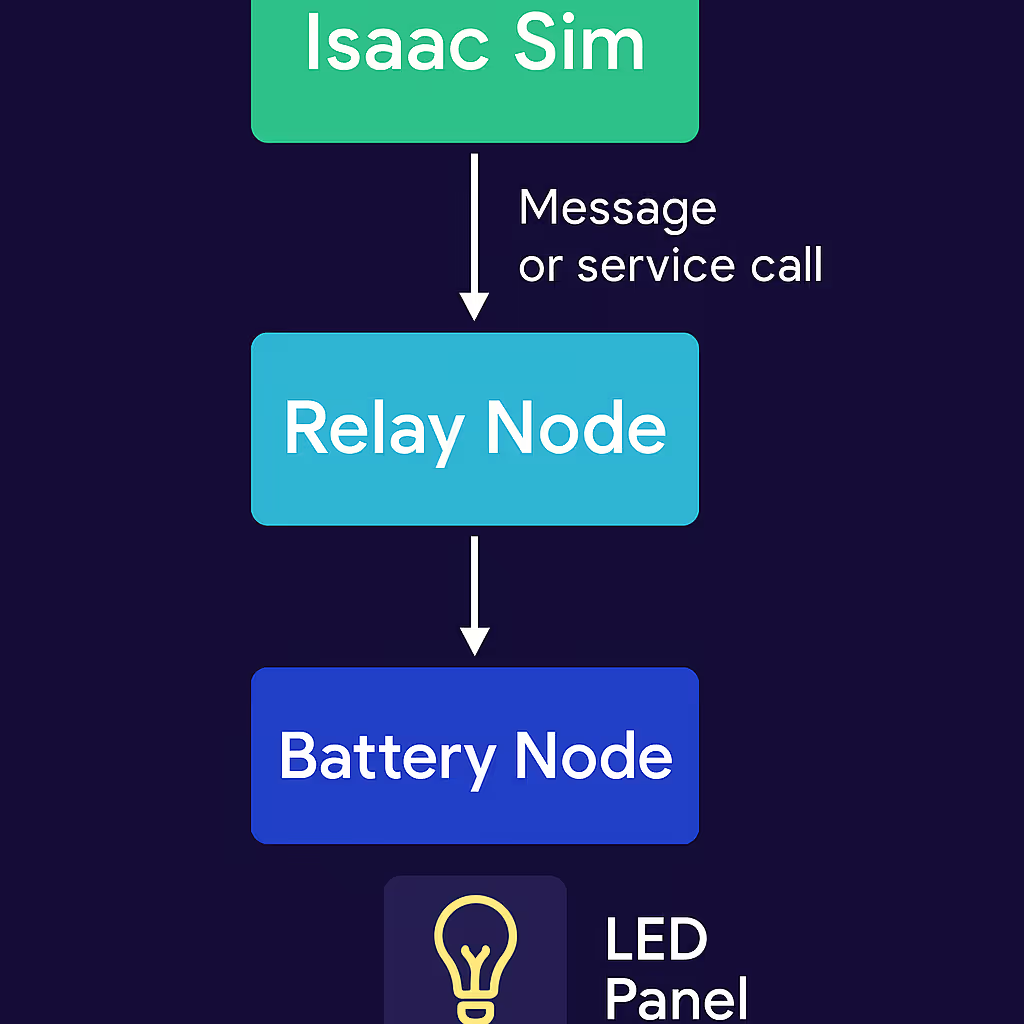
Services provide synchronous, two-way communication. One node sends a request and waits for a response—perfect for tasks like spawning a new robot or querying a sensor.
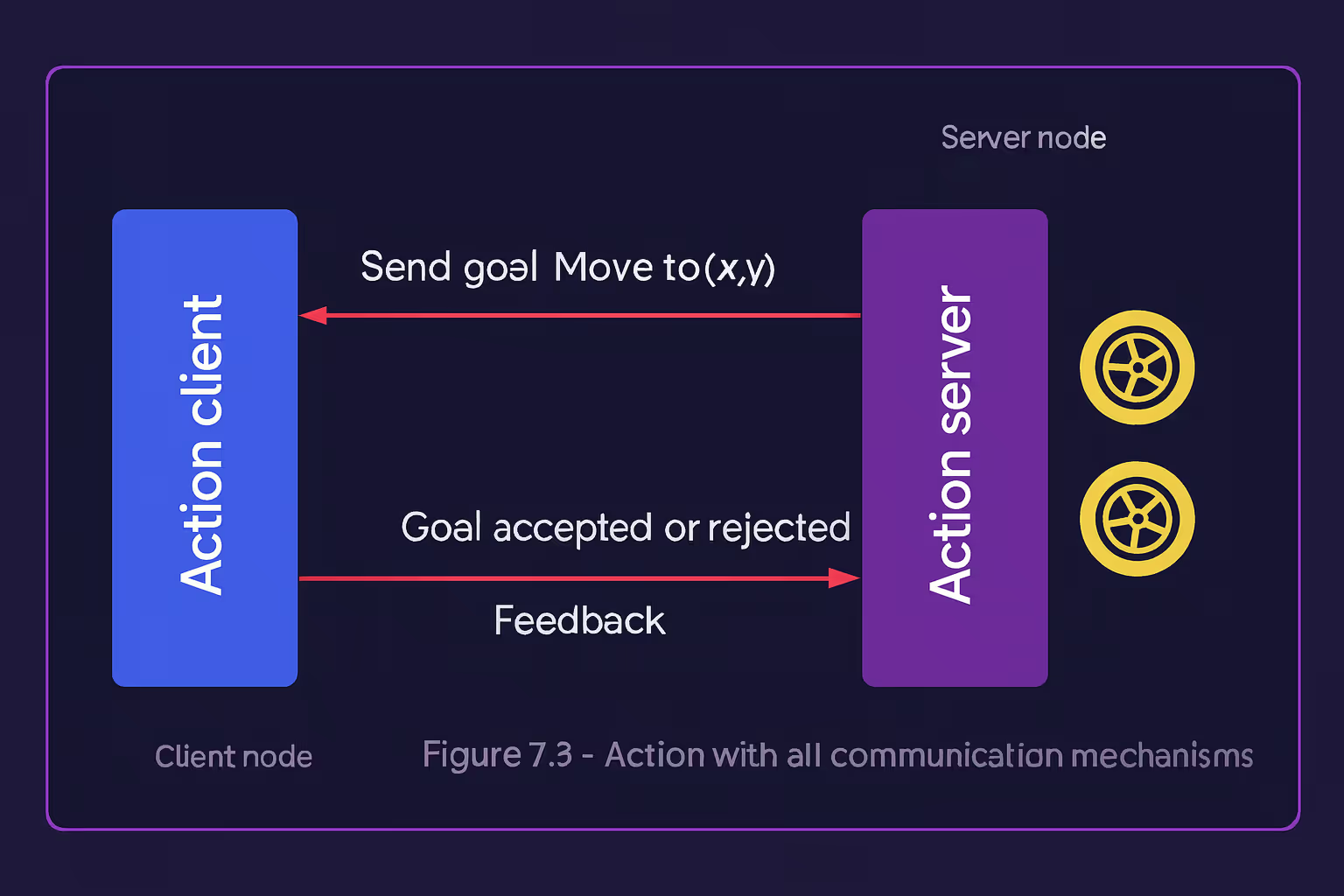
Actions are for longer tasks where you want feedback during execution (e.g., moving to a goal). They let a client monitor progress and cancel if needed.
Parameters are dynamic settings you can use to change how a node behaves—like setting speed limits, thresholds, or visual styles—without modifying code.
A launch file bundles all your startup logic: which nodes to run, with which parameters, in what sequence. It’s the backbone of reproducible deployments.
🔗 Want to dive deeper?
Click on any concept below to explore how it works, when to use it, and real examples:


Book a demo and get early access. Free trial!