Available Now
Book a demo and get early access. Free trial!

In ROS 2, a topic is a one-way data stream — it lets one node publish data, and others subscribe to it in real time. This pub/sub pattern is perfect for high-frequency data like joint states, velocity commands, or LiDAR scans.Isaac Sim takes full advantage of topics to mirror real-world robotics behavior inside a fully controlled simulation. Whether you're publishing synthetic sensor data or subscribing to simulated robot states, topics are the backbone of real-time interaction.
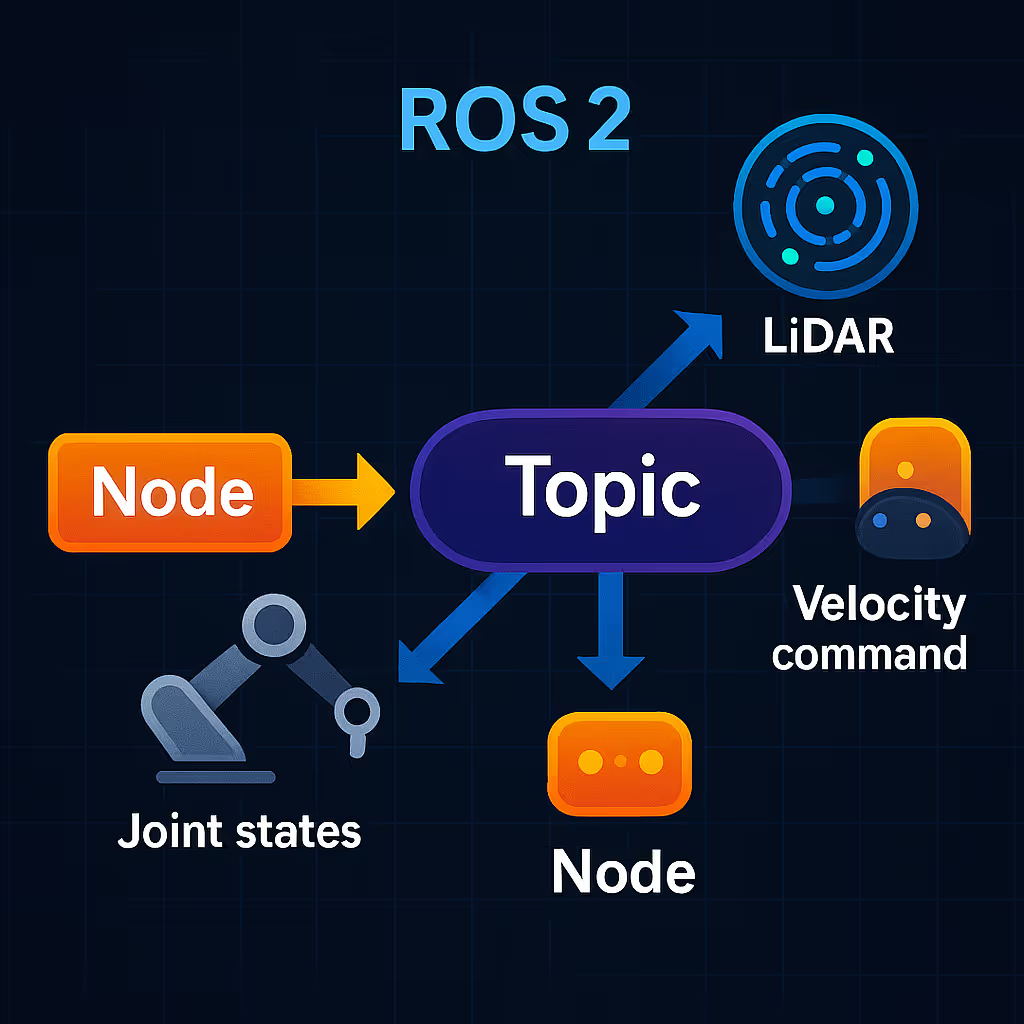
Isaac Sim is all about reproducing physical systems in simulation, and topics make that possible. Here's how:
/camera/image_raw. Your computer vision algorithm (in another node) can subscribe to that topic and process images as if they were coming from a real robot./cmd_vel, and your Isaac-simulated robot will move accordingly — just like in the real world.In Isaac Sim, topics can also be visualized and debugged using ROS 2 bridge tools or custom dashboards. Always check ros2 topic list, ros2 topic echo, and ros2 topic hz to inspect what’s flowing through the system.


Book a demo and get early access. Free trial!