Available Now
Book a demo and get early access. Free trial!

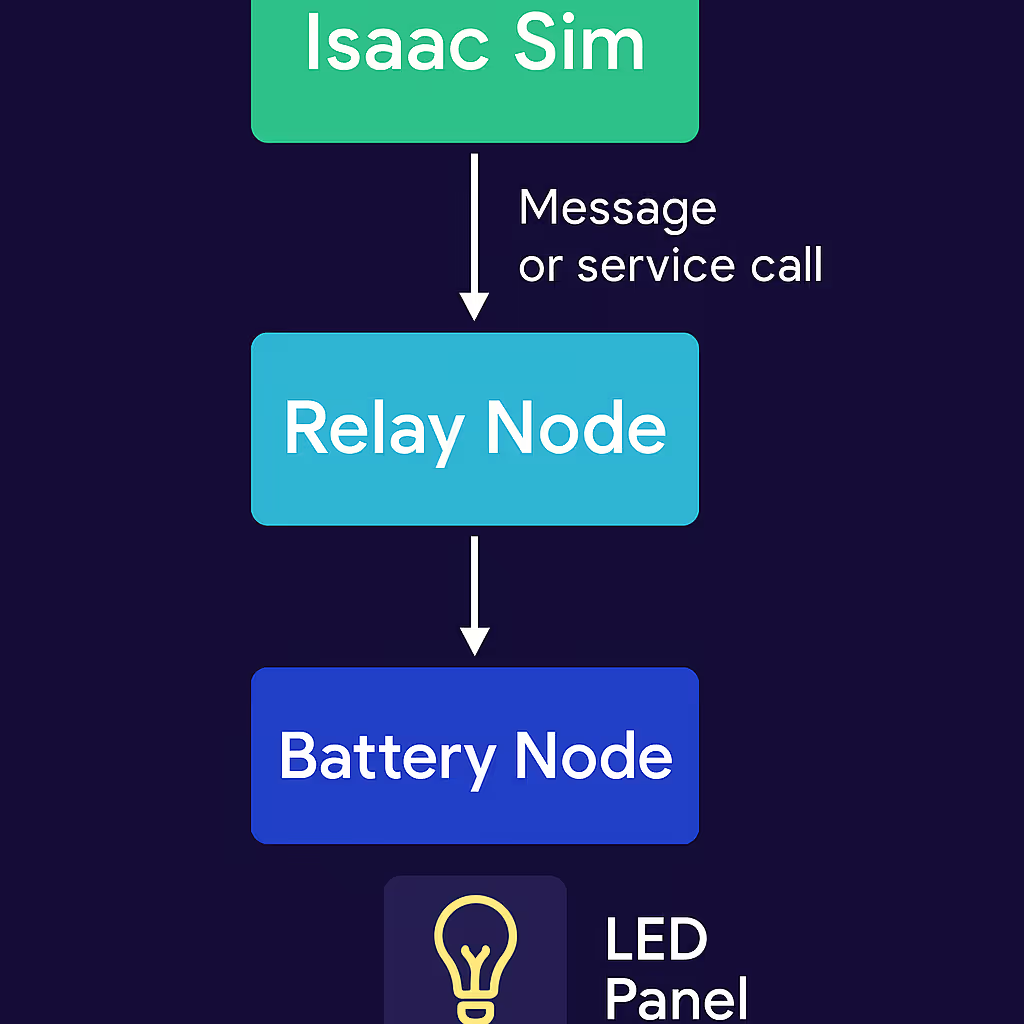
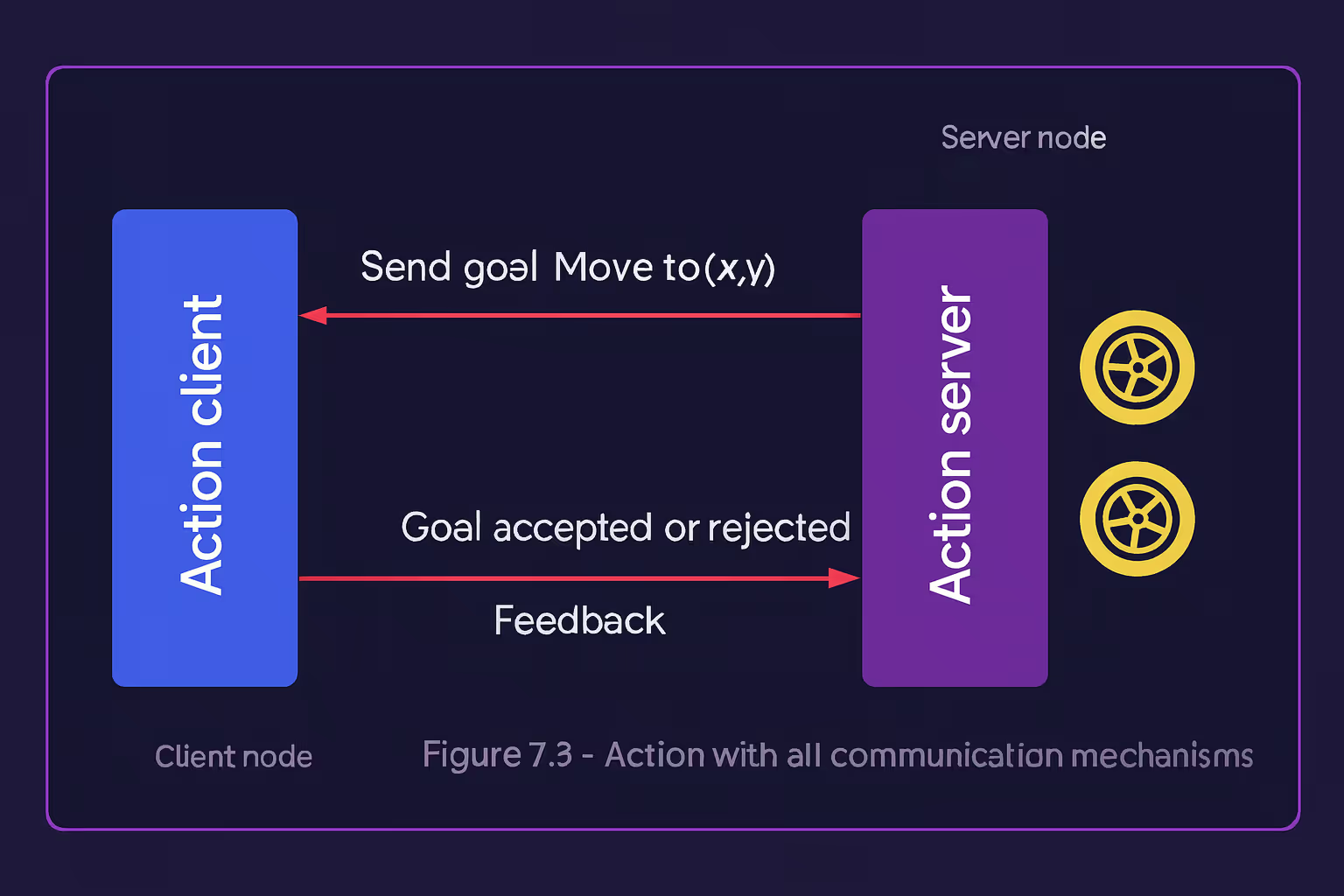
In ROS 2, everything starts with a node — a modular, isolated process that performs a single role in your robotic system. Nodes are like independent workers on a team. One might control motors, another listens to sensor data, and a third processes commands. They don't share memory; instead, they communicate through well-defined interfaces like topics, services, and actions.This modularity is what makes ROS 2 scalable. It allows developers to build, test, and deploy components independently, and swap them out as needed — a practice especially powerful when working in complex simulation environments like Isaac Sim.

🔍 What Does a Node Do?
A node can:
Behind the scenes, a ROS 2 node wraps around an event loop. It spins, listens, and reacts. That reactive architecture pairs beautifully with simulation environments where real-time performance and decoupled logic matter.
Example:
Let’s say you’re simulating a warehouse robot:
lidar_node: publishes point cloud from a simulated Isaac lidarperception_node: runs a YOLO or segmentation model on incoming dataplanner_node: decides where the robot should go nextsim_bridge_node: synchronizes the simulated robot with ROS 2 controlsEach of these lives as a separate ROS 2 node — which means you can run them in isolation, deploy them to different machines, or replace them with real-world equivalents when moving to hardware.
When simulation is done right, the same nodes used in Isaac can be deployed on actual robots with little to no modification. This “sim-to-real” transfer is one of the biggest strengths of the ROS 2 + Isaac Sim workflow. Nodes act as the boundary between simulation logic and deployable robotics code.
Bonus Tip:
You can run simulated sensors in Isaac and pipe their output to the exact same ROS 2 node that will handle real sensor data later. That’s development efficiency at scale.


Book a demo and get early access. Free trial!